Calibration
Sensor Coordinates
For verification, we show the sensor coordinates plots with the actual sensors installed, for each systems.
- Driving

- Handheld

Calibration Procedure
The calibration was mostly done by generating observable images from alternative vision sensors, and running Kalibr on it.

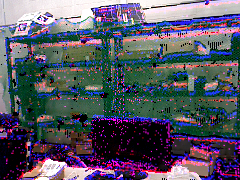
We used a special type of calibration pattern, which is checkerboard pattern printed on PCB. The heated PCB checkerboard shows different heat dissipation rate on aluminum and plastic parts, thus it is both observable in the RGB camera(a) and thermal(b). For the event camera, we use E2VID to reconstruct an apriltag(c).
Calibration Results
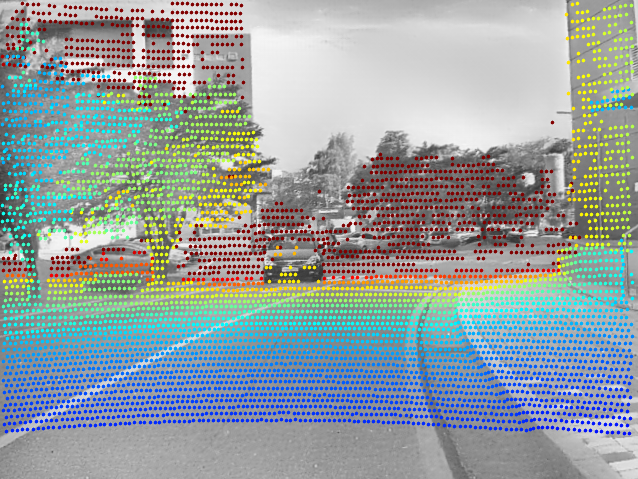
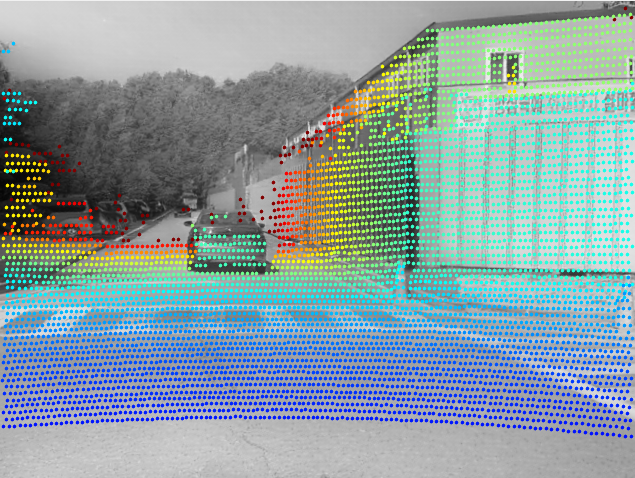
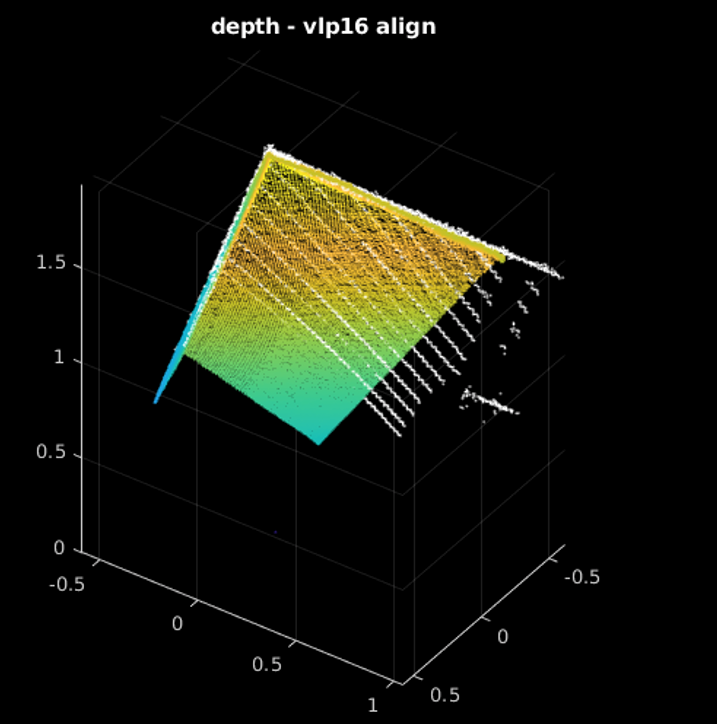
- RGB to LiDAR
 |  |
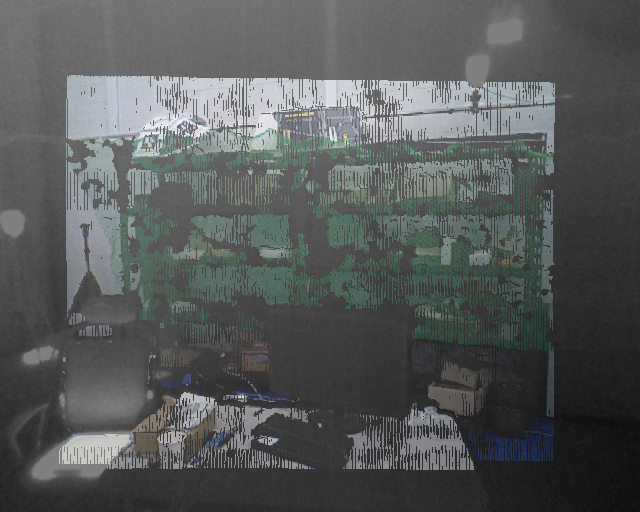
- Thermal to LiDAR
 |  |
- Event(reconstructed) to LiDAR
 |  |
- Event to RGB-D (handheld)
- Thermal to RGB-D (handheld)
- LiDAR to RGB-D (handheld)
Sample Algorithms
- ORB-SLAM reconstruction (campus)

- Visual Place Recognition (campus)

- LOAM reconstruction (campus)

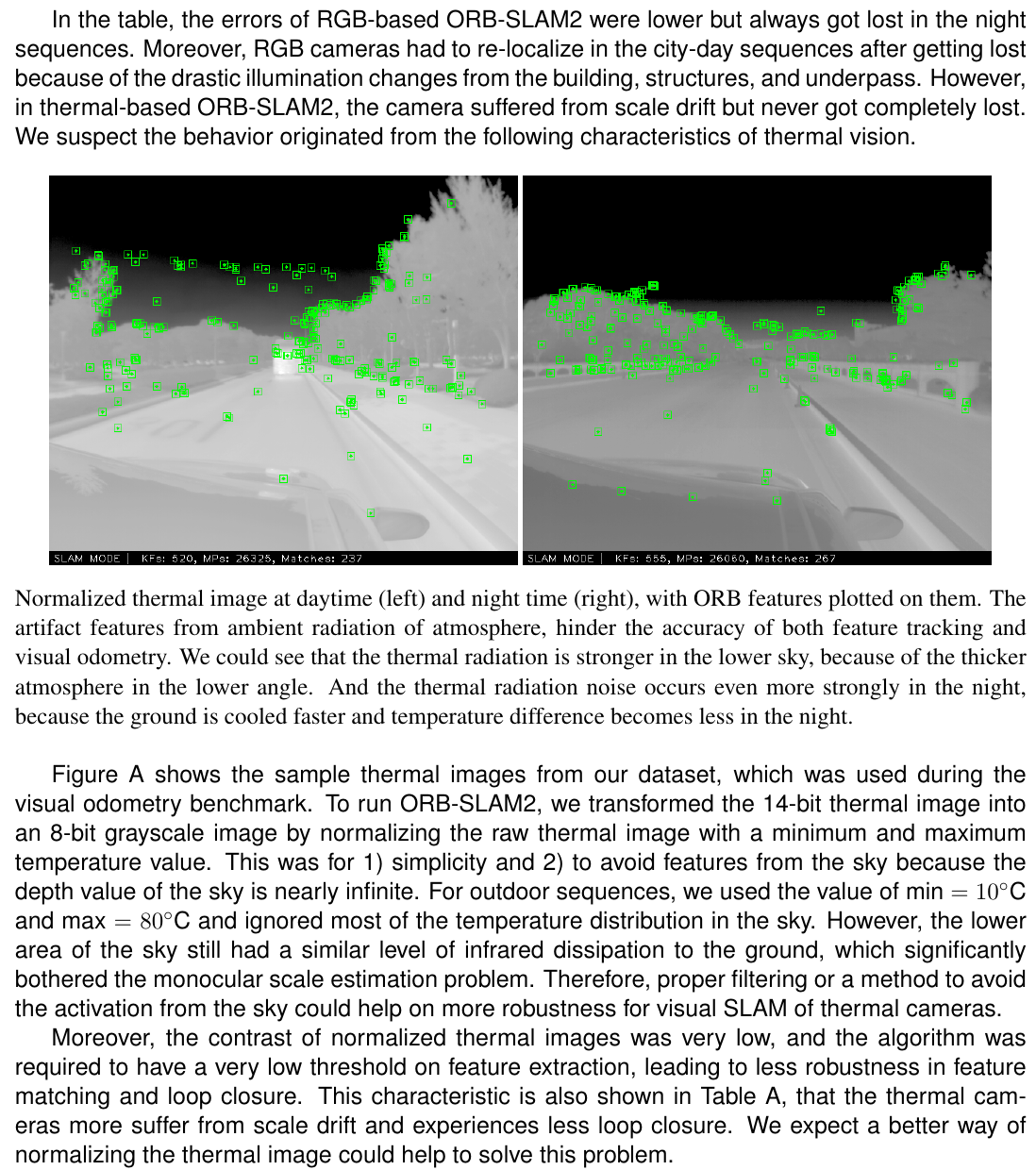
Discussions on thermal vision
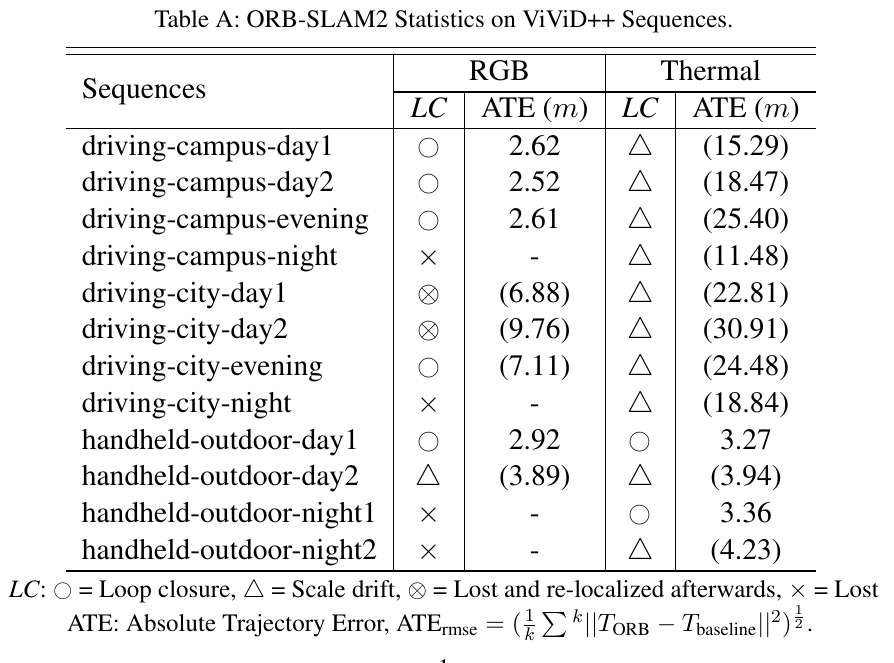
- ORB-SLAM benchmarks