Sensors and Sequences
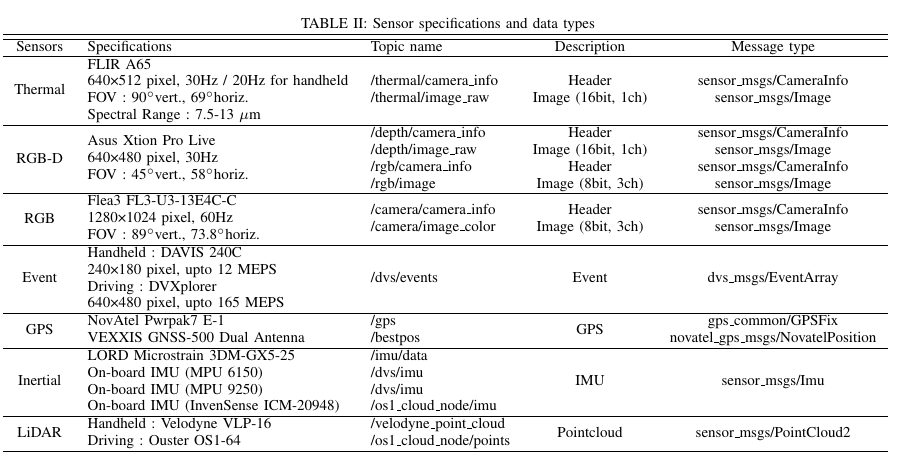
Sensor Specifications
- Handheld and driving sensors

- Sensor models and specifications
Sequences
We provide a dataset from two distinct sensor systems, handheld and driving. Handheld sequences provide motion and illumination variances and Driving sequences repeat the same trajectory in different times. A brief information is illustrated below.
 | 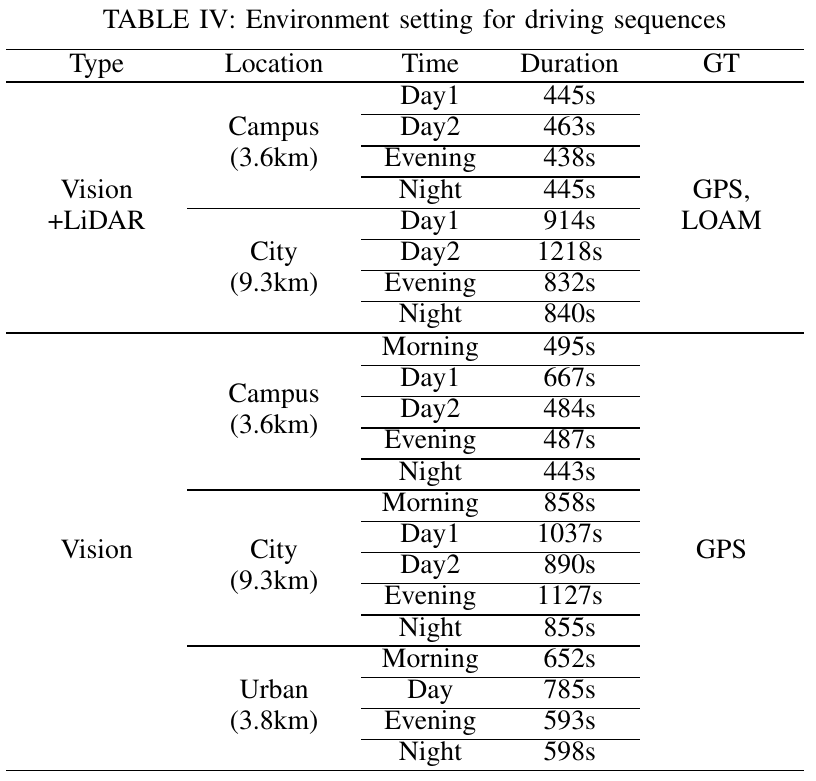 |
Sequence statistics

Sample images
Samples of event edges (upper), RGB (center), and thermal images (lower) from day1, day2 and night sequences, from left to right. The event edges and the thermal images are colored for visualization.

Groundtruth
We provide the GPS trajectory with LOAM poses, and the figure below shows the comparison between LOAM and GPS trajectories.
