ViVID++ : Vision for Visibility Dataset
In this work, we present a dataset for developing robust visual SLAM in the real world by providing:
- the first dataset to enclose information from multiple types of synchronized alternative vision sensors;
- multi-sensory measurements with ground-truth from external positioning system and generated from SLAM;
- wide range of environments in indoor and outdoor, recorded from multiple platforms.
Keywords
Data Sets for SLAM; Data Sets for Robotic Vision; Data Sets for Robot Learning
Overview
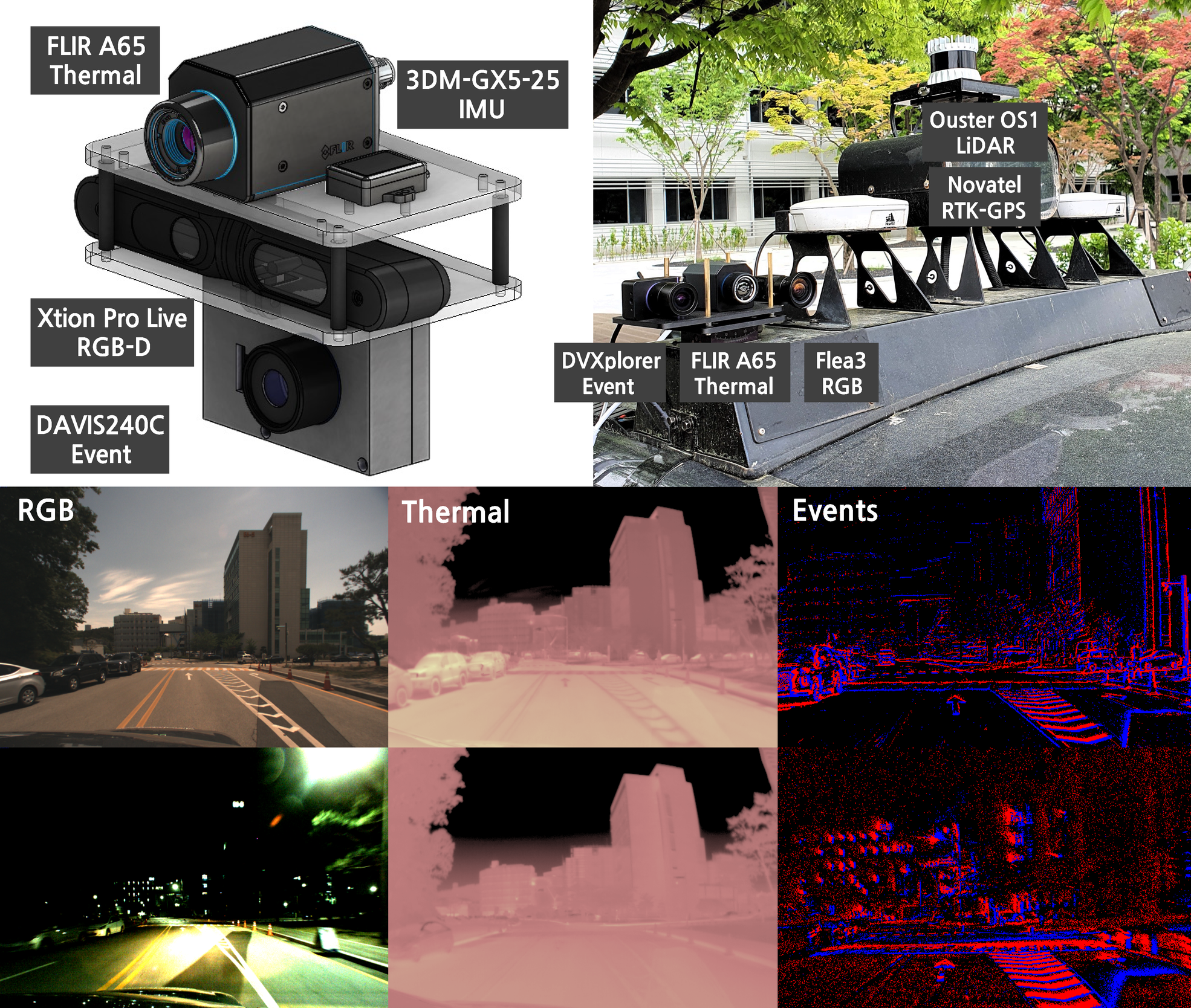
An overview of the sensor system and the dataset. We set up different sensor configurations for handheld (upper left) and driving (upper right). Sensor systems include RGB, thermal, events, depth, and interial measurements. Each sensor is indicated with the letter box. Each sensor's visibility differences are displayed in the lower row. Relative to RGB, thermal and event show less variance to the illumination condition.
The Dataset
Website License

This work is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.